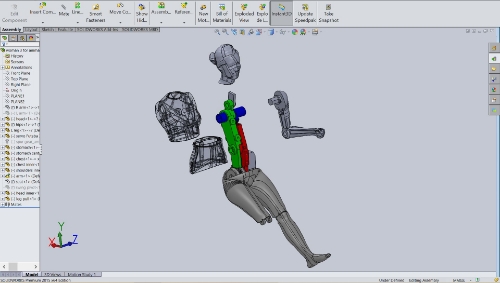
Swinging figure
She moves herself back and forth, when triggered by a sensor at the peak of the swing, to create a continual swinging motion.
Scan data was manipulated to pose the figure, then converted to a nurbs solid to allow the creation of accurate joints and fixings. Programed on an Arduino at first using a 6 dof sensor an then a magnetic encoder, for the swinging trigger and the position and speed of the servo.